
| ..::Visualization with prosections | |||
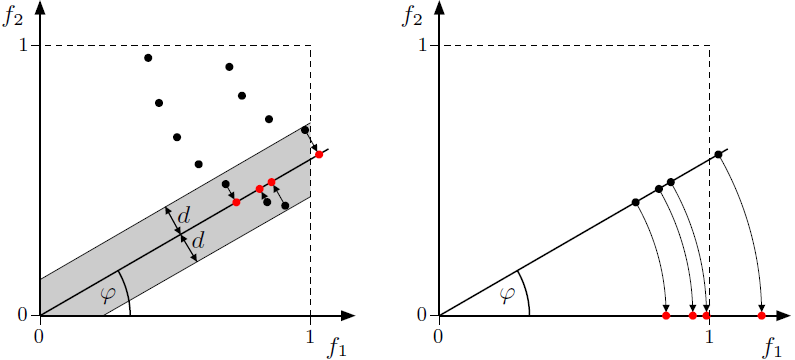
A prosection is a projection of a section. Visualizing 4D approximation sets using prosections works like this:
|
|||
Example: visualization of a discontinuous front |
|||
| For this example we use an approximation set of discontinuous shape (as in the DTLZ test suite, thanks to the Walking Fish Group for making these approximation sets available online). The prosection matrix for the 3D case: 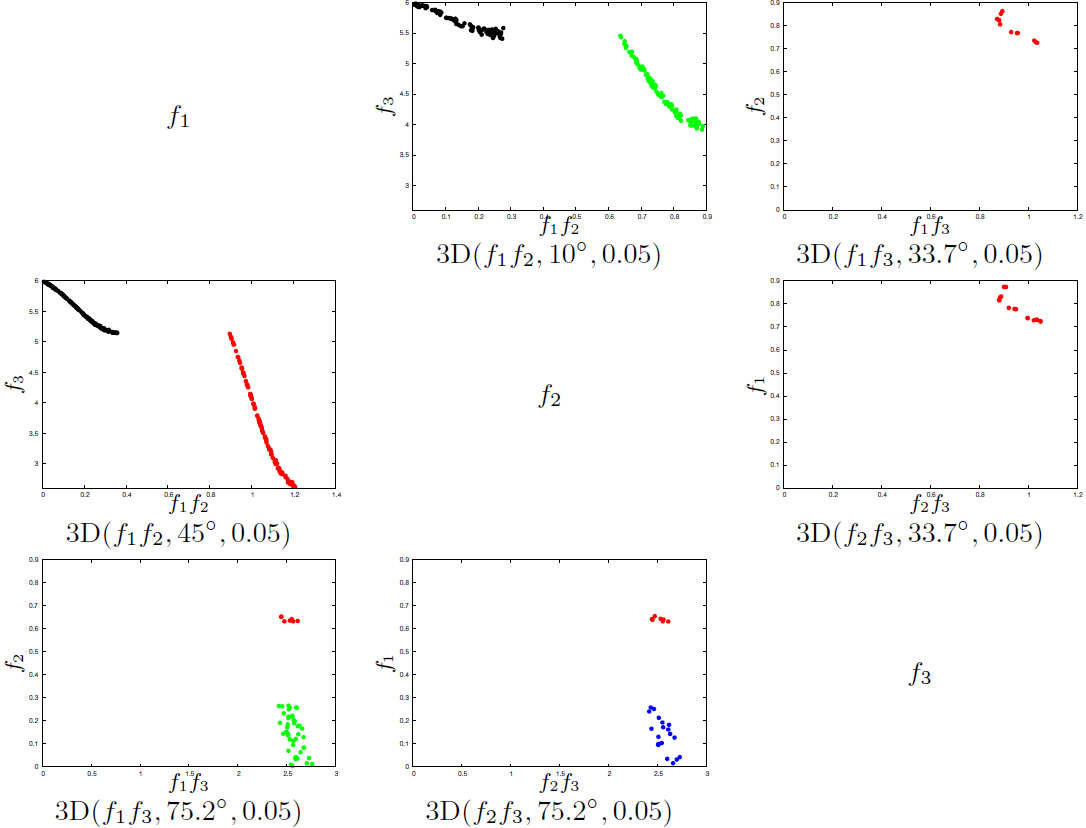 The prosection matrix for the 4D case: 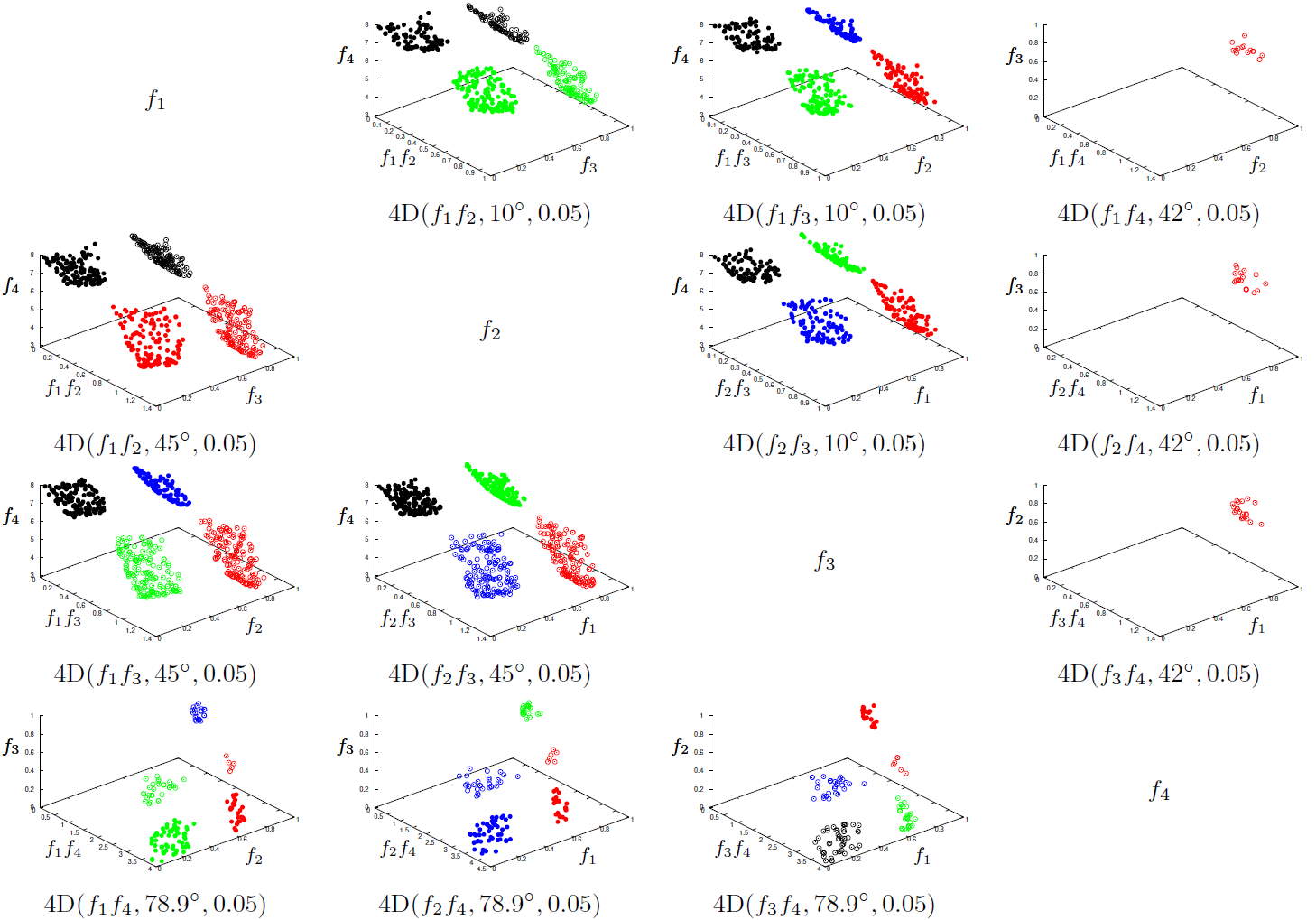 Using gnuplot we can make an animation of the prosection matrix with angles going from 0 to 90°:
|
|||